传统AI方法的使用技巧
Abstract
记录了Real Agents示例项目对于传统AI方法(GOAP、BehaviorTree)的使用和设计技巧
Goap的设计
在示例项目中,我们先设计了一套基于GOAP规则的AI Agents,使得游戏在没有生成式人工智能时同样可以运行。
另一方面,我们需要考虑生成式人工智能如何更方便地理解,因此要对一些Action和Goal进行组合或是拆解。
拆解Goal
Real Agents中的生成式代理是不允许直接了解Goal对象的,我们不应该在DescriptiveGoal中对世界状态WorldState进行修改,因此Real Agents密封了以下3个方法。
| public abstract class DescriptiveGoal : AIGoal<IRealAgentContext>, ISelfDescriptive
{
public sealed override void OnActivate() { }
public sealed override void OnDeactivate() { }
public sealed override void OnTick() { }
}
|
在AkiGOAP中,这些方法是用于处理Goal的生命周期,例如在示例项目中,假设NPC有一个Goal为观赏跳舞,那么它应该先获取舞者的位置。这部分逻辑如果写在Goal的OnActivate()方法中就会很方便。
Question
那不使用上面基于生命周期的方法我们如何处理这个需求呢?
我们可以将这个步骤同样作为一个Action,例如下面脚本:
| public class SetDancerAsTarget : DescriptiveTask
{
protected override void SetupDerived()
{
Preconditions[States.TargetIsDancer] = false;
}
protected override void OnActivateDerived()
{
if (CharaManager.Instance.TryGetChara(Career.Dancer, out var define))
Host.BlackBoard.GetSharedObject(Variables.Target).SetValue(define.transform);
worldState.SetState(States.TargetIsDancer, true);
CompleteTask();
}
protected override void SetupEffects()
{
Effects[States.TargetIsDancer] = true;
}
}
|
这个Action相当于一个触发器,启用后只需要运行一次。
简化Action
DescriptiveTask的使用
像上面的SetDancerAsTarget中,我们继承自DescriptiveTask,它是在DescriptiveAction的基础上增加了一个生命周期,这样使得对于这部分Action而言,生成式代理不需要思考是否需要被中断,在完成后将自动跳转至Plan中的下一个Action。
SequenceTask的使用
对于固定且耦合的动作,除了将它们作为Action由Planner搜索,也可以选择将它们放在一个Action中,例如下面的脚本:
| public abstract class RestAtPlace : DescriptiveTask
{
protected sealed override void OnActivateDerived()
{
sequence = new SequenceTask(RestoreEnergy);
sequence.Append(new MoveTask(Host.TContext.NavMeshAgent, RestEntrance))
.AppendCallBack(() =>
{
inRest = true;
Host.TContext.NavMeshAgent.SetDestination(Host.Transform.position);
Host.TContext.NavMeshAgent.enabled = false;
Host.Transform.position = RestPoint.position;
Host.TContext.Animator.Play("Rest");
})
.Append(new WaitTask(waitTime))
.Run();
}
}
|
示例项目中使用AkiAI提供的SequenceTask来完成序列动作,你也可以使用例如Dotween等补间插件或UniTask等异步插件来完成相同功能。
Tips
上文使用中文名词动作用以区别GOAP中的Action
BehaviorTree的使用
如果你的序列动作比较复杂,你可以使用行为树来完成这部分工作,例如下面的脚本:
| public class PickVegetable : DescriptiveAction
{
protected sealed override void OnActivateDerived()
{
Host.GetTask(Tasks.PickVegetable).Start();
worldState.SetState(States.IsWorking, true);
}
protected sealed override void OnDeactivateDerived()
{
Host.GetTask(Tasks.PickVegetable).Stop();
worldState.SetState(States.IsWorking, false);
Host.TContext.Animator.SetBool("IsPicking", false);
}
}
|
这使得Action脚本变得更简洁,而下面才是行为树的具体实现:
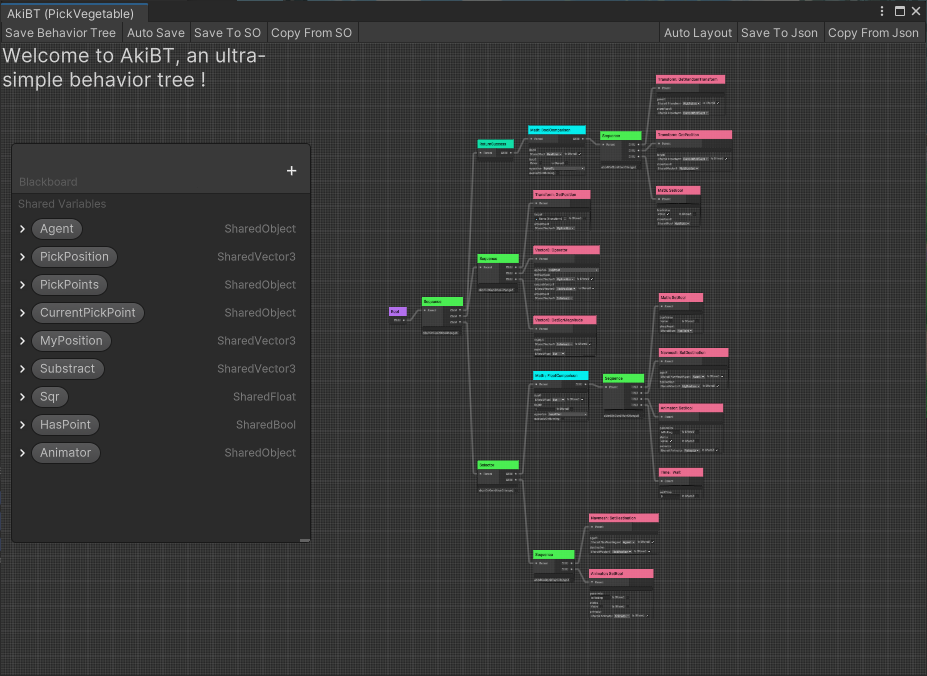
Extend
比较有趣的是,结合Builder Pattern或者Domain Specific Language的方式,如今你可以让大语言模型来生成行为树了!
BlackBoard的使用
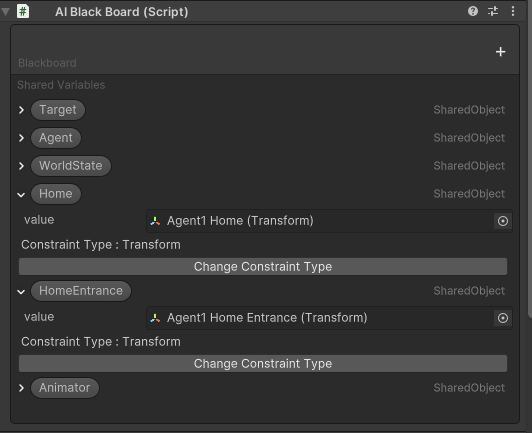
对于一个AI Agent而言,它需要响应自身和世界的状态变化。在Real Agents中我们借助于AkiBT中的BlackBoard来存储这些数据。
对于Agent自身的数据,我们使用AIBlackBoard存储,例如家,当前目标,等,你可以在Inspector中进行调试和修改。
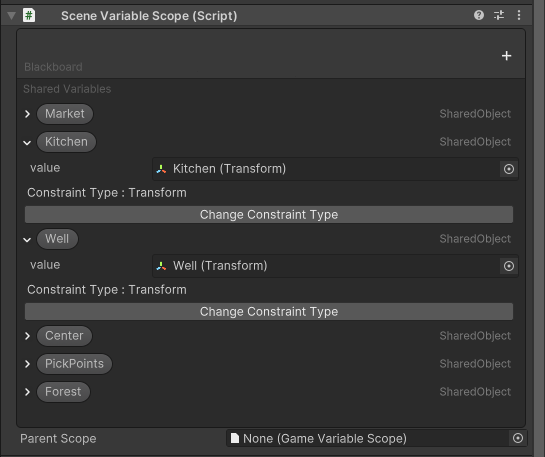
对于场景中全局的数据,例如店铺的位置,农田采摘点的位置,我们使用SceneVaribaleScope存储。